





SCENE软件专门设计用于所有的Focus和第三方激光扫描仪而设计。通过使用实时现场配准、自动对象识别、扫描图像配准和定位功能,轻松而高效地处理和管理扫描后的数据。通过整合利用无靶标和基于靶标的自动扫描定位功能生成的图像,快速而简单地生成全色彩的高质量数据。
一旦SCENE准备好扫描数据,用户就可以通过执行简单的测量、创建出色的三维可视化效果、或者导出到各种点云和CAD格式,立即开始评估和处理。此外,SCENE还具有令人印象深刻的虚拟现实视图,使用户能够在VR环境中体验和评估捕获的数据。
利用SCENE云端共享云 – FARO提供的基于网络的主机托管服务,随时随地实现全球共享和协作,轻松且安全地共享扫描项目数据。
为了保密,离线项目共享解决方案,请使用 SCENE 2go 向合作伙伴和客户分发只读的扫描项目。
客户将体验速度更快、格式更通用的扫描数据导出到 Autodesk RCP/RCS 点云的服务。用户可以选择将其导出为项目、群集、单次扫描或扫描部分(选择和剪切框)。

自动删除在扫描场景中多余的移动对象,例如人和车辆。对于两个或更多扫描配准,新增的移动对象过滤器使用户可以更快地移除出现在相邻两站重叠区域中的差异对象。
现在 .obj 导出增加了包含纹理网格的功能,其中点云的一部分可以从 SCENE 导出并导入 FARO Zone 3D(或其他应用程序),数据能以彩色显示并可以作为三维模型进行操作。现在,这些模型也能以 .obj 格式导入 SCENE。
网格控制由平移和旋转手柄构成,允许手动放置网格,使操作更容易。
SCENE 支持新的扫描仪功能,能够重新扫描需要以更高分辨率扫描的远距离区域,以执行精确的靶标识别或捕获具有更高细节精度的更小区域。

SCENE 2019 中新的激光高动态范围(Laser-HDR™)功能通过巧妙的图像创建选项扩展了传统的扫描仪 HDR 功能,允许现有的 Focus 客户在极短的时间内实现类似的 HDR 结果。
SCENE 现在可以从低分辨率扫描中输出高分辨率全景图像。除节省时间外,用户不再需要在现场有额外的设备,例如单独的数码相机。
虚拟现实功能允许详细查看项目点云。用户可以选择使用 Oculus Rift 或 HTC Vive 眼镜,在办公室体验和探索身临其境般的现场细节。
共享标记(编码标志)支持统一的 FARO Focus 和 Freestyle 数据处理和配准。
SCENE增加了实时现场配准功能,能够实时地处理、配准并将三维数据无线传输至现场的移动设备或电脑*。
扫描仪控制任务
通过 SCENE 用户界面以无线方式直接连接至移动设备,用户现在可以远程控制 FARO FocusS 或 FocusM 激光扫描仪。
允许为总览图的视图设置背景颜色、扫描点颜色和突出显示颜色。总览图现在可以在 SCENE 中用作布局图,因此也可以作为分层图导出到 WebShare。
在现场或在办公室验证并调整扫描仪的补偿。对于所有新推出的FocusS Laser Scanner,SCENE 和 SCENE LT 均支持该功能。
多种高级过滤选项(例如“边缘伪影和项目点云过滤器”)改进了每个数据集的清洁度和色彩平衡。
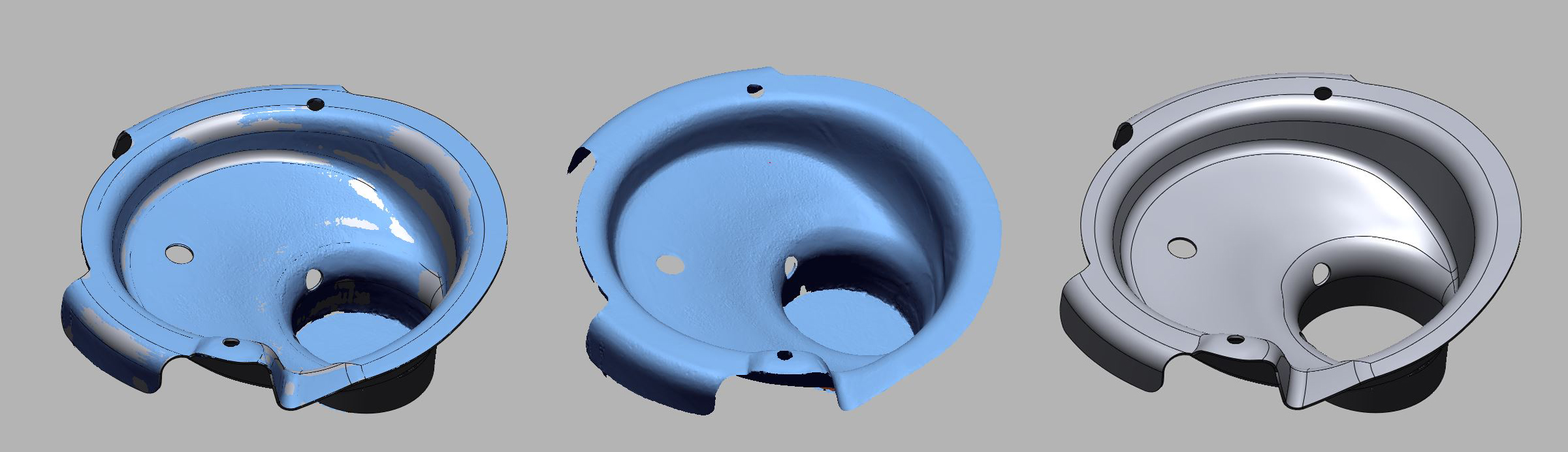
SCENE 三维网格引擎可从三维选择器或裁剪框中创建扫描对象表面的细节丰富的水密网格。新增加的平滑选项可降低测量噪点和创建纹理平滑的网格。支持的网格格式包括:.stl、.obj、.ply 和 .wrl (VRML)。

先进的立体表面绘制引擎能够以无与伦比的速度和质量显示数量巨大的扫描点。
即便在极差的光照条件下,全自动 HDR 映射功能也能将逼真的图像细节和色貌保存在利用 Focus Laser Scanner 捕捉的扫描数据中。**
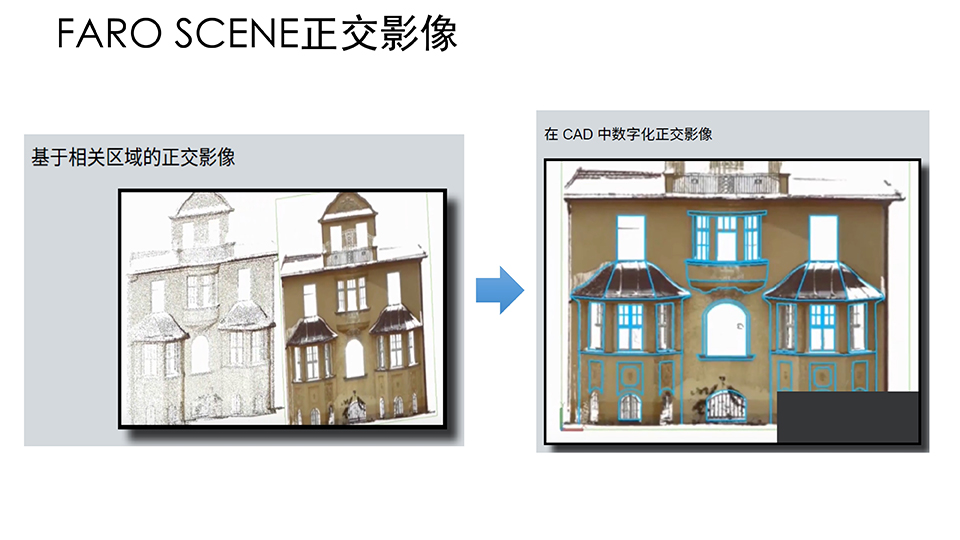
每次校准画面时,用户都可以利用正射影像功能来创建正射图像。另外,用户还可以通过常见图像格式导出 X 射线模式的二维图像和二维/三维 .dxf 文件。
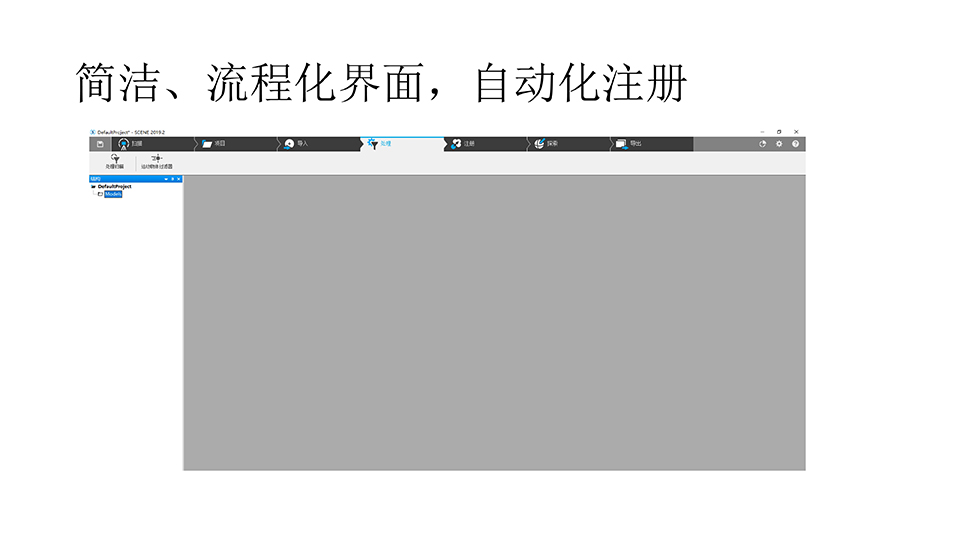
SCENE 采用直观的用户界面,为完成复杂的任务提供指导和支持。
利用所有适用的过滤功能,将扫描数据、剖面图和完整的项目点云直接上传至 WebShare Cloud,创建质量极佳的三维可视化数据。
独特的插件界面能够让用户通过安装其他应用软件来扩展SCENE的功能。FARO 3D应用中心提供了所有的应用软件。
*仅适用于FocusS 激光扫描仪。
**仅适用于具有 HDR 功能的扫描仪。
