意大利JRC 3D Reconstructor软件
JRC 3D Reconstructor软件来自于意大利,该软件专门处理地面三维激光扫描仪数据和二维影像,最初设计是用于工业厂房,现在主要应用于建筑领域和土工工程领域。
软件模块化分开,其中包括
Ø 核心模块:
核心模块是一个平台可以添加其他模块,能够浏览大型激光点云和表面模型,提供了大量的计算和所有模型仪器的分析,线性,表面。匹配的照片可以被提取到AUTOCAD绘图工具直接连接。
Ø 拼接模块:
可以手工或者自动的拼接目标或者地理坐标参考。
Ø 表面模块:
创造新的表面,提供了一个智能的几何简化,可以过滤得到简化的模型。提供一个特殊的工具可在简化后的模型之间自动转换。
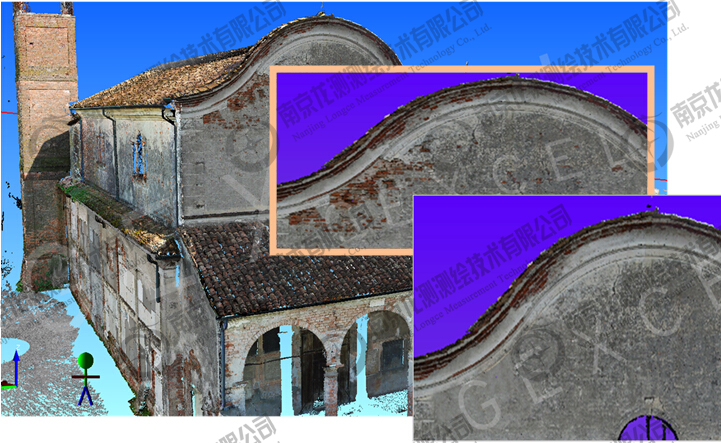
Ø 纹理映射模块:
任何图片都可以在点云中进行校准,并且可以用于纹理映射创建逼真的纹理模型。
Ø 控制模块(专门针对FARO激光扫描仪):
可以控制FARO扫描仪有和顶部固定相机进行数据采集工作。
应用领域包括:
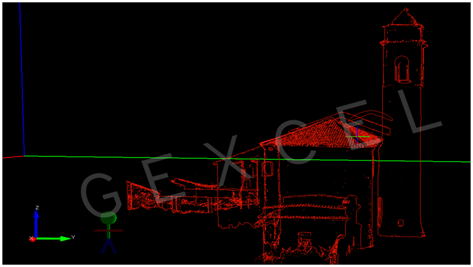
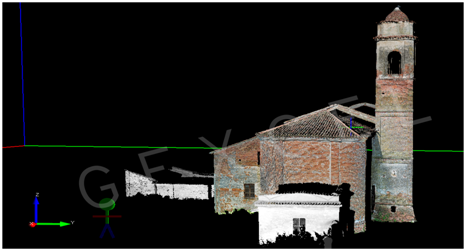
1. 建筑文化遗产考古
为有代表性的历史建筑物,考古遗址和城市测量建模提供应用,具体包括没有目标的自动拼接,和没问任何数码相机纹理映射用来产生照片级别的三维模型,提供测量工具和提前截面,浏览控制制作视频,导出AUTOCAD图纸支持的功能。
2. 土工工程
分析复杂结构如水坝,桥梁,基础设施,隧道。
映射有裂纹的纹理相机照片,对混凝土结构分析,
3. 地质调查
集合机载激光数据和地面扫描数据进行土地测量,过滤消除准备噪音,并提供几何信息(即通过模型倾向为地质力学分析给地质专家使用)。生成数字地面模型,体积计算和等高线生成,山泥倾泻提取。检验工具用于改变地形模型或者冰川监测分析。
4. 核工业与工业监控
3D浏览识别功能,现场模拟三维工厂设计验证。
X
截屏,微信识别二维码
微信号:13770727943
(点击微信号复制,添加好友)
打开微信
微信号已复制,请打开微信添加咨询详情!