NavVis VLX是专门为中小型项目,例如台阶,狭窄房间和杂乱的建筑工地等复杂环境而设计的便携型设备,能够达到较高的精度水平。
那么,NavVis VLX捕获的数据精度如何呢?南京龙测带你一探究竟~
当涉及到移动扫描仪器,全局精度取决于项目本身,所以我们无法就此给出一个通用的声明。取而代之,我们利用三个不同场景作为案例研究,对精度进行分析:
01停车场
停车场是移动扫描系统非常理想的扫描场景,因为停车场为开放型空间,可以进行许多“闭环”扫描。
02狭长的直线走廊
由人工搭建,但对于移动扫描系统来说,这是一个非常特别的复杂场景,没有闭环。
03办公室
这是一个通过走廊连接的多个小房间组成的办公室,小房间之间还有额外的门连通,复杂程度适中。此环境下,我们可以进行有限的“闭环”扫描。
案例分析 1:停车场
此案例非常适合做移动扫描:一个拥有大面积开放空间的停车场可以进行很多闭环扫描。
此次项目的扫描区域大约为1,500平方米,我们采用 NavVis VLX进行扫描,用时为20分钟,包含捕捉8个控制点。
在此特定案例中,我们没有捕捉任何全景照片, 我们对NavVis VLX捕获的数据进行了两次处理:
两次数据处理:
a) 地面控制点仅作为校准,但不进行控制点优化;
b) 使用地面控制点进行全局点云优化和校准。
a) 没有进行控制点基准优化的点云
b) 使用控制点进行基准优化的点云
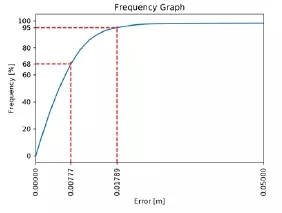
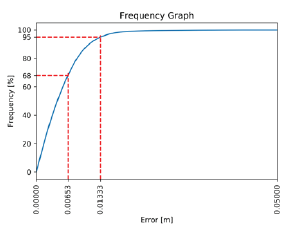
从下图所示分析,我们可以得到检测环境的绝对精准度:
a) 情况:
在没有基于控制点进行优化的情况下,68%可信度的偏差是8mm,95%可信度的偏差是18mm。
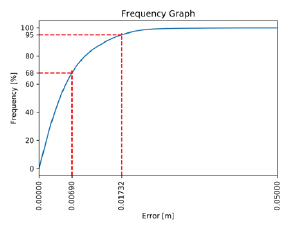
b) 情况:
在进行控制点优化后,68%可信度的偏差是6mm,95%可信度的偏差15mm。
在此具体的测试方案中, 我们仅使用控制点作为校准,而非作为全局点云优化使用。
案例分析 2:长走廊

长走廊的环境对于移动扫描极具挑战,此次实验选择了一条笔直并且狭长的(大约54×2m)走廊。
此次环境添加了3个控制点进行扫描,在没有进行任何闭环扫描的情况下一次性完成:起始于走廊的一端,行走到另一端,不返回到起始位置。
同上一案例一样,我们对所获数据进行了两次处理:
两次数据处理:
c) 仅使用控制点作为校准,不进行控制点基准优化;
d) 使用控制点作为全局点云优化及校准。
c) 控制点仅作为校准,无控制点基准优化
d) 使用控制点作为全局点云优化及校准
值得一提的是,在c)情况中,绝对精度在95%可信度下的测量偏差为17mm, 与d)条件下相比较,只高出4mm。同时,c)情况中,控制点仅被用作校准,并无全局点云优化。所以,这意味着,在长走廊环境中无需使用控制点,即可以达到同样的精度。

案例分析 3:办公室

此案例代表了中等尺寸办公室或住宅项目的典型布局——沿着走廊排列并通过几个额外的门的进行连接的小房间。
项目大约460平方米,并以一个数据集在30分钟完成扫描。这个项目没有用到控制点,但我们在可能的区域做了一些闭环扫描。每间隔1-2米,扫描设备捕获了全景图像,这有助于对点云进行高仿真的着色。
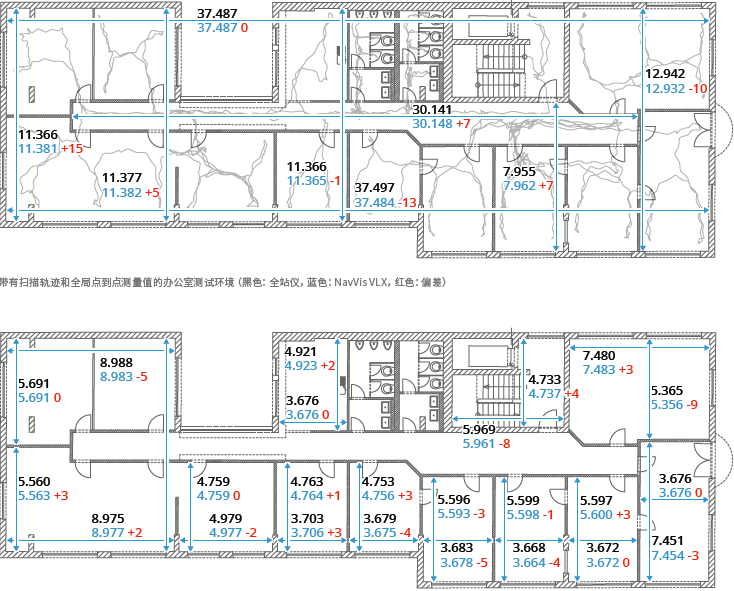
作为此案例的基准,我们使用高精度的全站仪连接到CAD系统上生成了一个CAD模型。
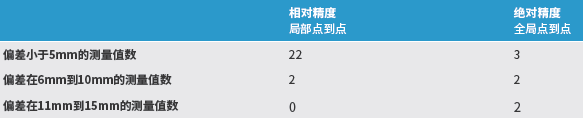
为了进行对比,我们在CAD模型中手动进行测量(下方黑色的数字)并将结果与在NavVis VLX点云中的量值(下方蓝色的数字)进行对比,记录下两组数据的偏差,下方红色的数据代表了NavVis VLX点云的误差, 具体数据请看下方表格。
在此案例中,24个测量点中只有一个误差大于8mm,并且没有任何一个绝对测量值偏差大于15mm。测量的相对精度似乎高于产品手册中表明的数字(68%可信度偏差小于8mm)。
但是,由于在点云和CAD模型中手动测量的流程容易导致出错,与全局点云到点云指标相比,这种基于全站仪的总体评估的可靠性较低。即便如此,当涉及到由小房间组成的布局情况中,本次测试提供了一个良好的参考 。