我们从12个未参照点云中提取了9229个距离值,从12个参照点云中提取了 9460个距离值。尽管测量结果数量庞大,但我们认为,关键是要检查数据中是否存在潜在的异常值,即与其他结果相差很大的距离,并在可能的情况下对其进行修正。
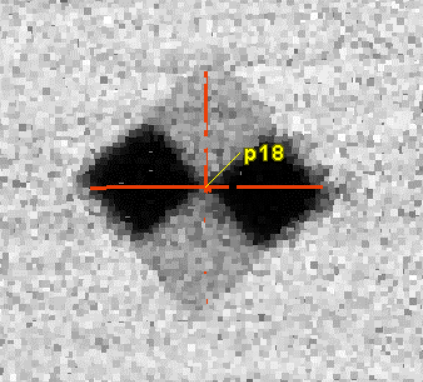
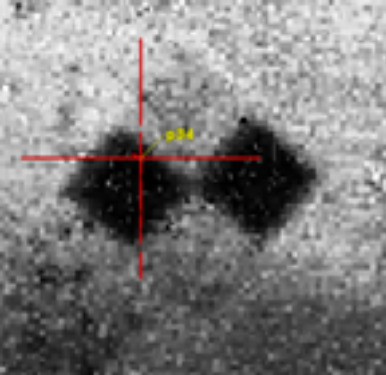 ▲P34 的目标提取失败
▲P34 的目标提取失败
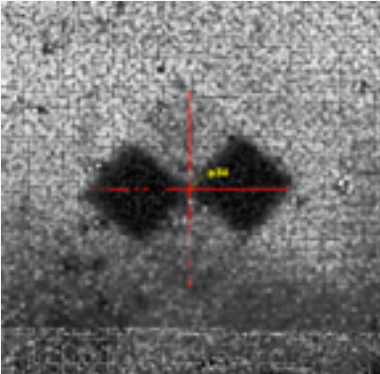 ▲改装后的目标 P34
▲改装后的目标 P34
相对方法(无全球关键点)
为了找出相对点云中的异常值,我们手动检查了距离测量值。
我们很快就发现,一台仪器产生的点云在涉及目标P34的任何距离上都显示出比预期值更大的数值。
仔细观察后发现,从点云中提取的目标中心与目标的真实中心不符。重新拟合后,我们再次提取了中心点。现在,新计算出的距离不再出现异常值。
当检查的重点放在偏差大于15毫米时,我们又发现了三个异常值。由于没有明显的误拟合,我们保留了提取的目标进行计算,没有删除或重新拟合。
绝对方法(GCP)
如前所述,这种方法涉及用地面控制点处理数据,从而在参考数据的坐标系中生成点云。
尽管进行了上述处理,但在最终的点云中仍可能出现离群点距离。幸运的是,参考数据能让我们事半功倍地识别异常值。我们可以将点云与参考数据进行比较,找出目标坐标在三维空间中的偏离点,这表明可能存在提取不正确的目标。
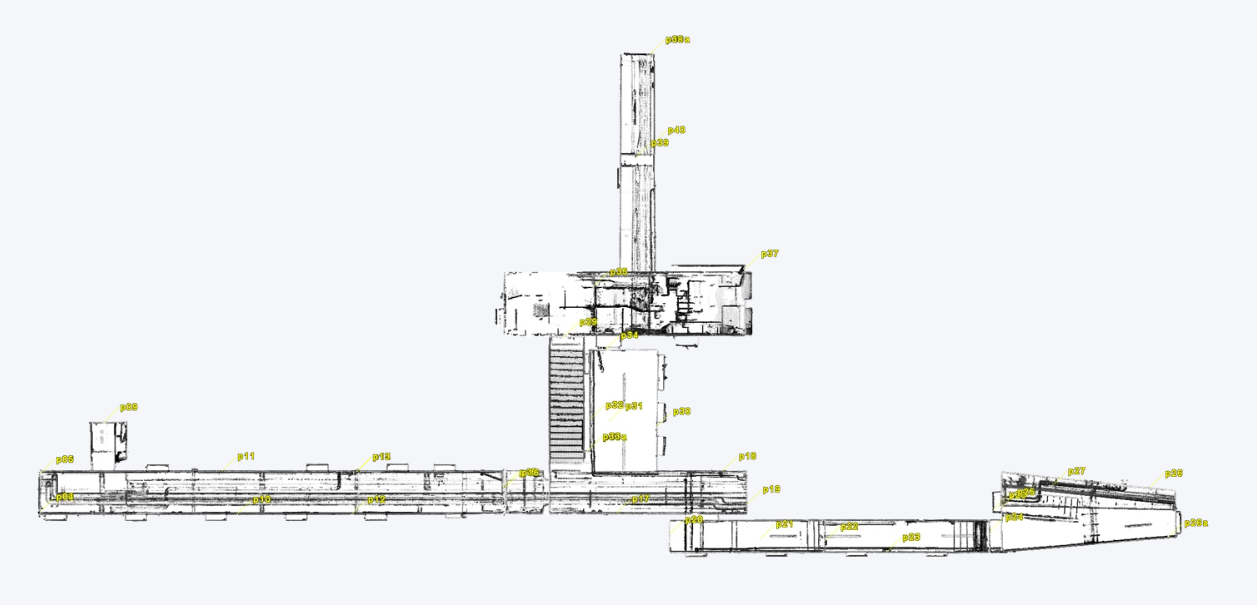
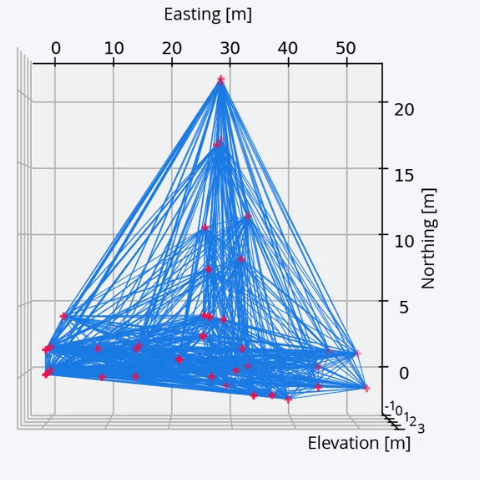
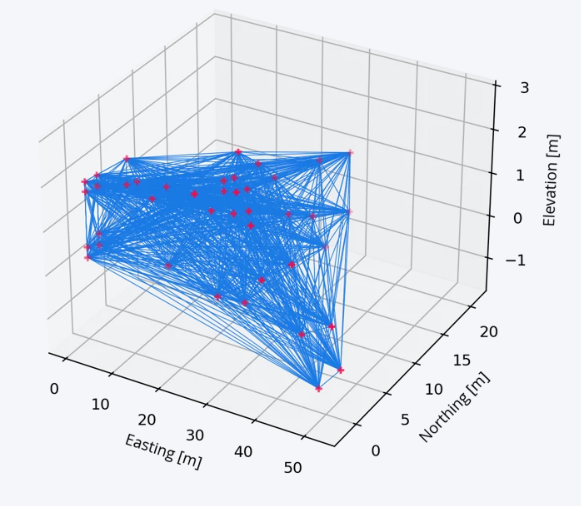
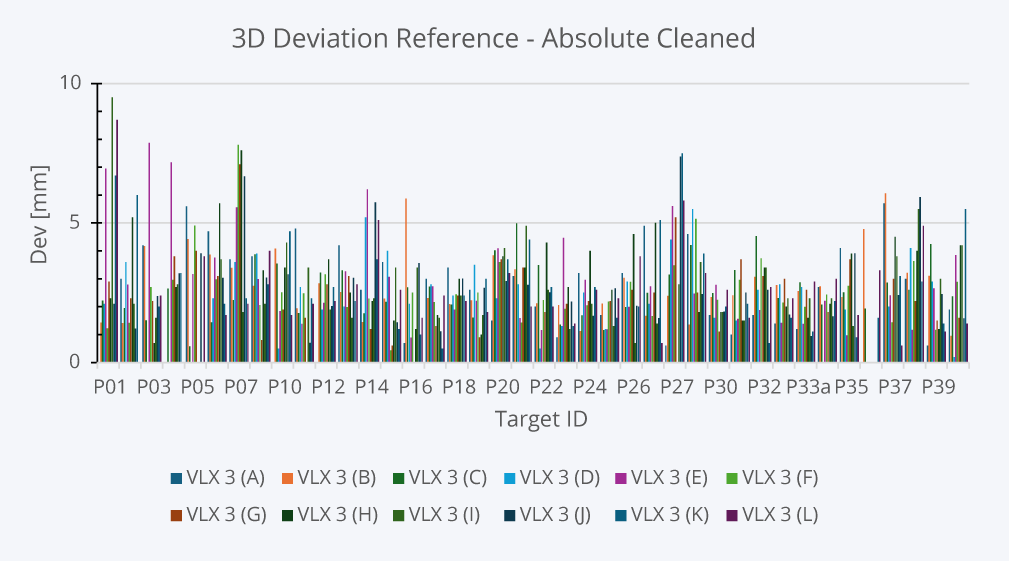
下图显示了提取的目标及其与参考坐标的相应 3D 偏差。
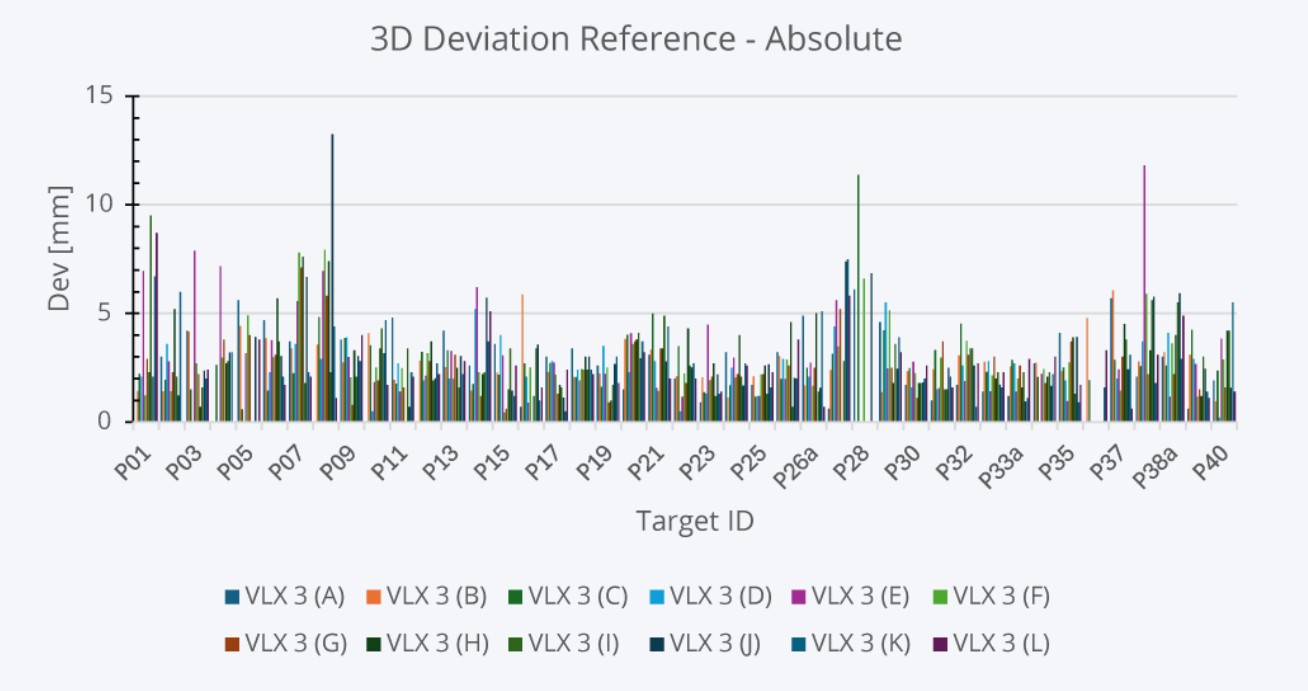
图中有三个峰值,分别对应目标 P08、P28 和 P38。
仔细观察 P08 目标,我们发现 rgb 着色点云的中心位置存在明显偏差。由于强度对比度不足,算法无法找到正确的目标中心。请参见下图目标P08 。
目标 P28 被放置在一个扫描仪只能在短时间内看到目标的位置。因此,该区域的点密度和强度给目标识别带来了挑战。见下图目标 P28。
目标 P38 在点云中的强度分布略不对称。经目测验证,目标中心不正确。见下图目标 P38。
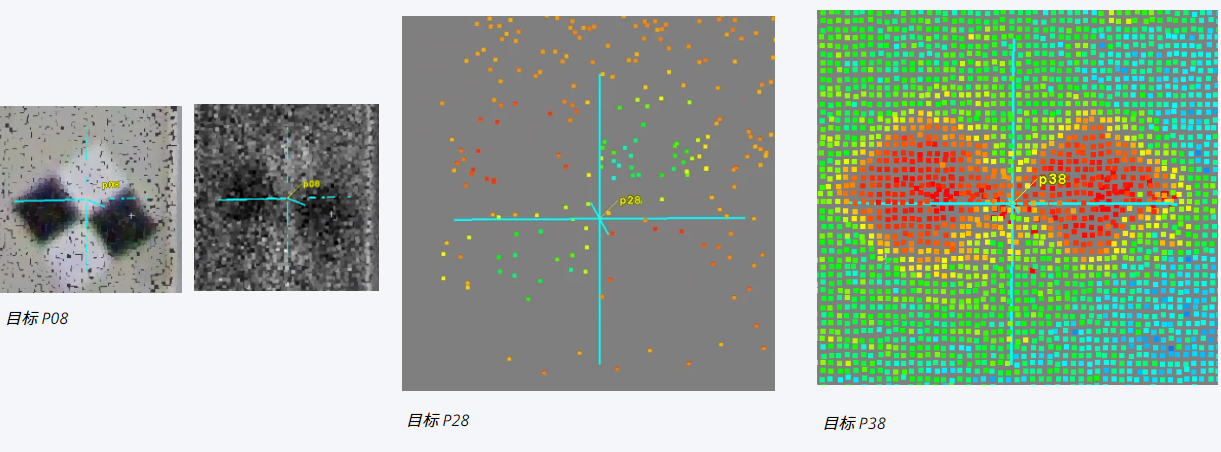
当发现这三个异常值是不正确的测量值时,我们将它们从进一步的计算中删除。虽然一些提取的目标没有显示出理想的强度信息,但从视觉角度来看,它们仍然是正确的,因此我们保留了它们,以作进一步研究。
相对方法(无全球控制点)的结果
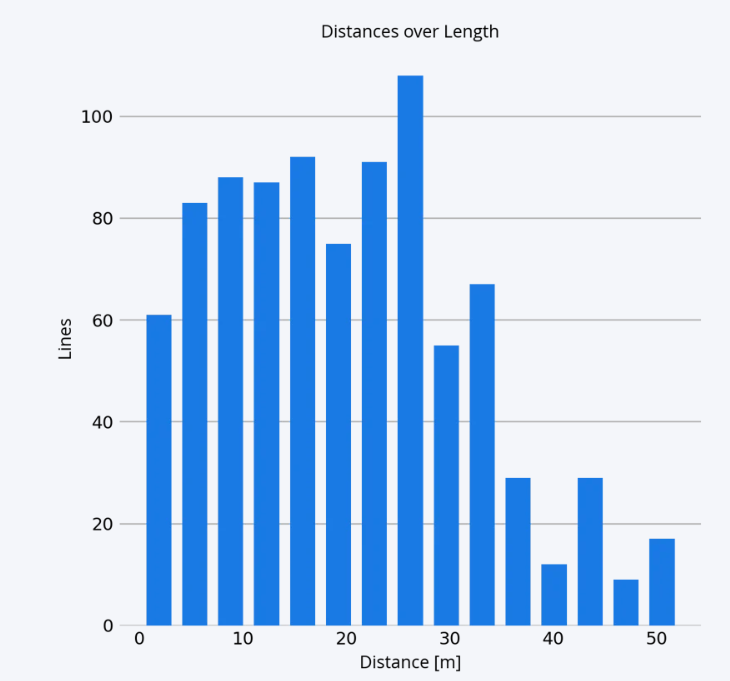
下面的直方图显示了每个点对点测量距离与基准点的偏差程度。误差分布以 0.5 毫米 "桶 "为单位。黄色表示百分位线。
为了说明如何读取结果:红线显示 68% 的误差为 3.1 毫米,这意味着 68% 的点云距离测量值与基准点的偏差在 3.1 毫米或以下。
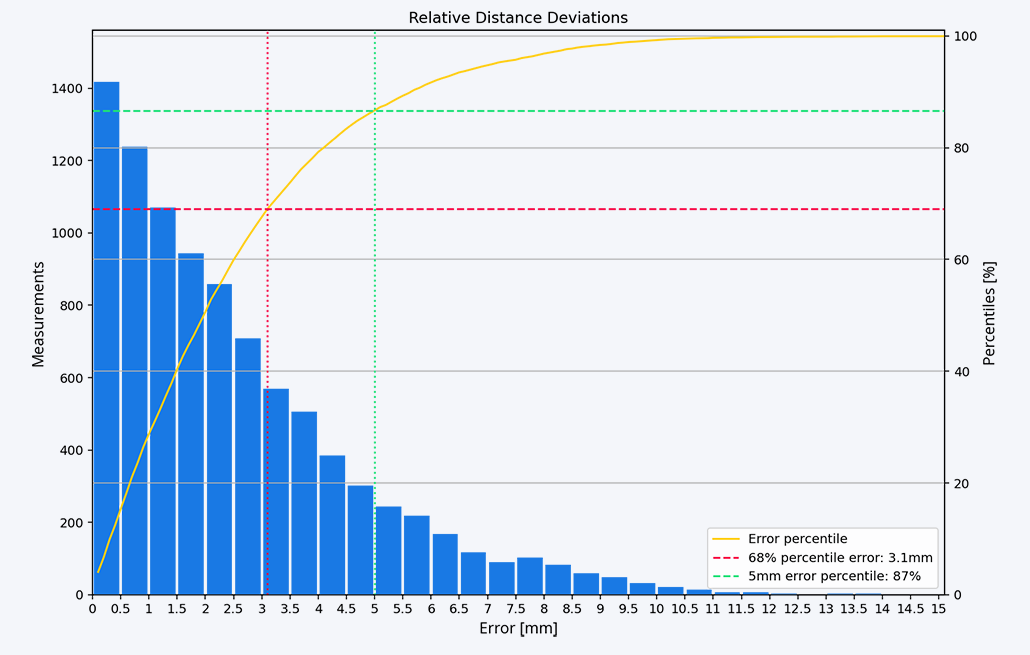
▲相对偏差柱状图
绿线表示NavVis VLX 3 规格表中规定的5毫米精度。从这条线可以看出,从点云中提取的 87% 的距离测量值与基准点的偏差在5毫米以内。
绝对方法(GCP)的结果
如前所述,对于绝对方法,我们使用NavVis VLX 3 地面控制点功能处理所有点云数据。值得注意的是,我们并没有考虑操作员手动敲击 GCP 的准确性和精确度。
绝对方法可用于以下多种不同方式确定精度基准。
点对点比较:绝对点与参考点
上图说明了点云中的目标中心与基准点的偏差程度。所有异常值均已去除。
在 478 个观测点(每个观测点对应一个点)中,平均偏差为 2.8 毫米,中位数为 2.5 毫米。
绝对数据与参考数据的距离比较
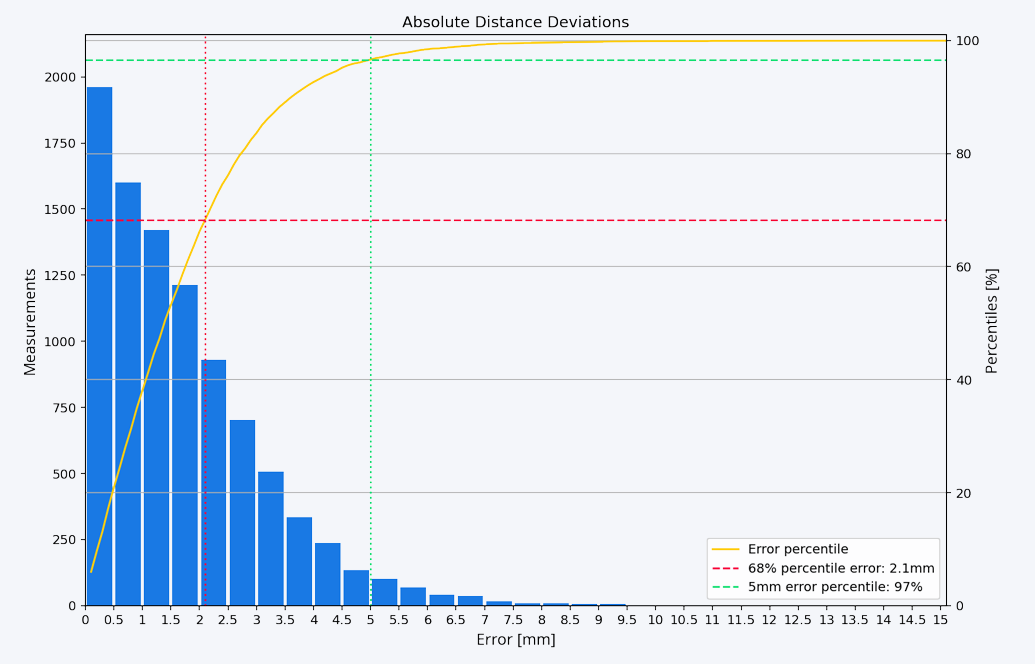 ▲绝对偏差柱状图
▲绝对偏差柱状图
上面的直方图显示了点对点点云中的距离测量值与基准点的偏差程度。
误差分布以 0.5 毫米 "桶 "为单位。黄线表示百分位数线。为了说明如何读取结果:68%(如前所述)的误差为 2.1 毫米。这意味着点云中 68% 的距离测量值与基准点的偏差在2.1毫米或以下。
绿线表示NavVis VLX 3 规格表中规定的 5 毫米精度值。从这条线可以看出,从点云中提取的 97% 的距离测量值与基准点的偏差在5毫米以内。
结果汇总
经测试,所有 12 个NavVis VLX 3 仪器的性能均优于规格表中的说明。
即使不使用全球定位系统,在这种特定情况下,精度也可达到3.2毫米,68% ~1 σ。下表列出了该文件中描述的距离测量结果汇总。