欧思徕SR-RL6,便携式旋转激光全景测绘机器人,轻便的全场景大空间三维实景数据捕捉器。采用模块化设计理念,可以额外配置全景相机、GNSS等功能模块。以灵活的结构设计和优化的SLAM算法,诠释了单激光雷达在获取空间三维结构数据上的优越性。
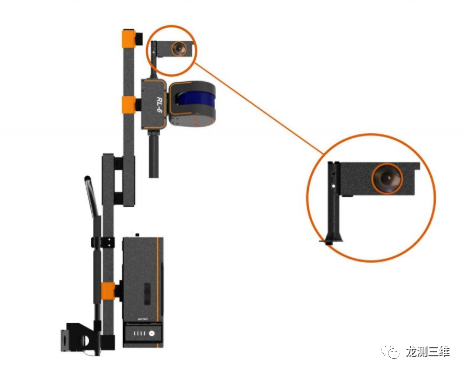
旋转式激光雷达
欧思徕®智能重新定义扫描方式,将电机与激光雷达相结合,电机带动激光雷达顺时针旋转,360度扫描空间结构,无死角,并且自主研发旋转式点云拼接算法。
厘米级精度
欧思徕®智能自主研发的SLAM技术,在闭环作业的室内或者地面测区,不规则结构的地下空间测区,不再需要引入控制点依然可以获得厘米级精度的点云数据成果。
多样作业场景
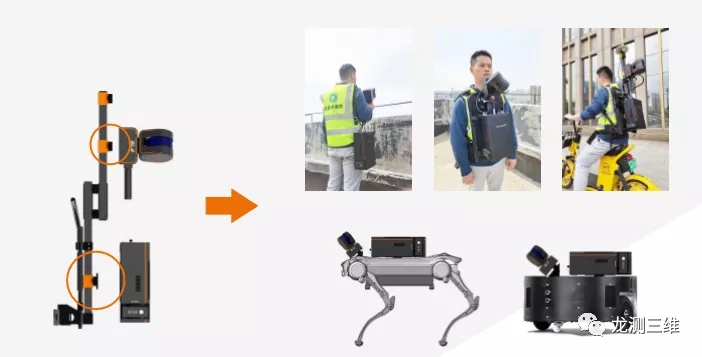
SR-RL6凭借其手持或者背负等多种作业方式,适用于非机动车道、停车场、矿堆、巷道、管廊、树林、建筑等多种场景下的制图、建模、成果分析等多种应用。
多种作业方式
产品附带背包式挂架,支持手持、前置背负、后置背负、推车挂载、电瓶车挂载、机器狗挂载等多种作业方式,可以依据项目需求选择合适的作业方式,提高生产效率。
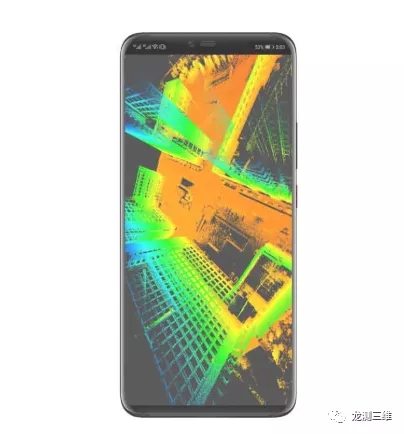
即时查看点云模型
可选择利用手机等移动端实时查看当前采集时间的点云模型,查看设备当前工作状态,控制作业流程,作业过程中即可查缺补漏,不会让用户二次返工。
无线连接
SR-RL6摒弃有线连接,不需线缆,用户使用手机等移动端电子产品连接SR-RL6的WIFI,即可控制设备的数据采集作业,查看设备状态,提高作业安全性。
技术参数
>>>>功能拓展一
加配GNSS模块
于SR-RL6的硬件配置基础上加配GNSS高精度模块,利用RTK-SLAM®技术进行数据生产。只要在作业过程中取得部分路径上的RTK固定解数据,数据解算过程中该RTK固定解数据即可参与联合解算,提高点云精度。与此同时导入的七参数可将点云坐标转换到目标坐标系统,外业不必二次架站获取控制点,内业不必人工选点,外业数据生产效率和内业数据处理效率都能够提升数倍。
GNSS高精度模块支持GPS、GLONASS、Galileo、BDS、SBAS、QZSS等卫星导航系统,用户可以利用千寻位置或CORS站实现RTK功能。RTK-SLAM®技术主要适用于室外百万平米面积测区内的数据生产任务,能够保证点云精度,提升作业效率。
>>>>功能拓展二
加配全景相机
于SR-RL6的硬件配置基础上加配消费级全景相机,利用全景相机记录现场,辅助分辨地物,查看地物属性,同时开放图像及其位姿数据,用户可在第三方软件中使用图像数据,加配消费级全景相机能够以较低的成本获得巨大的功能提升。
>>>>软件
OmniSLAM® Capturer
OmniSLAM® Capturer 软件是欧思徕(北京)智能科技有限公司自主研发的一款数据采集软件,利用移动端的便携性,在手机上操作,控制数据采集,进行状态查看。
✔支持一键初始化设备,无需走8字路线
✔实时查看电量、存储量、数据量等参数
✔设置账号密码连接千寻位置、CORS站等
✔可选查看当前场景的点云模型与作业路线

OmniSLAM® Mapper
OmniSLAM® Mapper 软件是欧思徕(北京)智能科技有限公司自主研发的一款数据处理软件,将原始数据解算为点云、图片、轨迹数据,界面简洁,使用逻辑简单,点选操作少,具有自动处理能力,可为用户提供完整的多种场景的数据解算服务,保证成果的优先交付。
✔载入数据自动处理,无需人工干预
✔处理过程中删除作业人员引起的噪点
✔实时显示数据处理过程,掌握处理进度
✔Windows系统,CPU频率越高,速度越快
✔利用投影参数和七参数转换到CGCS2000等大地坐标系
✔多段数据批量处理
✔导出作业路经的位置和姿态数据
✔支持增加点云模型密度,细节更加丰富
✔导入RTK控制点纠偏,二次优化模型精度
✔导出不同分辨率,不同间隔的全景图像和单镜头图像

OmniSLAM® Viewer
OmniSLAM® Viewer 软件是欧思徕(北京)智能科技有限公司自主研发的数据应用软件, 拥有点云和全景图像的自由导览等常规功能。
✔真彩色、EDL等多种显示方式
✔点云模型和全景图像的 1:1 套合
✔点云模型的量测,位置、长度等
✔点云、图像和轨迹的显示, 支持快速导览

>>>>行业应用
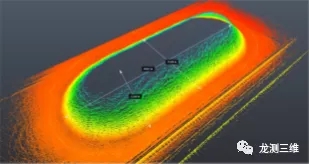
方量测算
SR-RL6可以获得堆体等不规则立体结构的点云模型,计算体积、面积或者容量等。
下图所示为某工厂堆料场棚内长88.8米,宽37.8米,高30米的煤堆,使用SR- RL6手持扫描仪进行方量测算。绕煤堆行走一圈采集数据约需要4分钟,使用OmniSLAM" Mapper软件进行数据解算,约需要15分钟,最后使用第三方软件计算煤堆方量。
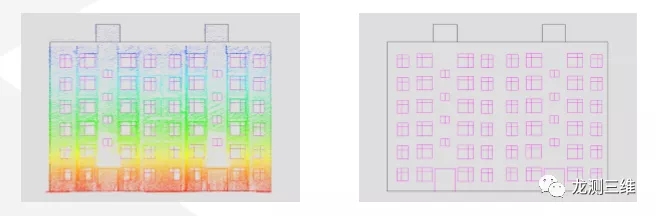
立面测量
SR- RL6可以获得建筑结构的高精度点云模型,支撑建筑立面、景观、广场、绿化、停车场等场地设施的改造,同时普查违章搭建情况。
下图所示为某住宅小区建筑立面改造的点云与线画图。使用SR- RL6手持扫描仪朝向建筑立面扫描获取原始数据,使用OmniSLAM° Mapper软件进行数据解算,最后使用CAD或其他软件绘制建筑立面改造设计施工图。
建模
SR- RL6可以获取建筑物内部的点云模型,利用此点云模型能够实现室内建模、室内设计、空间改造等,也可以辅助消防应急预案编制。
下图所示为某建筑物内部从点云模型到三维模型的构建过程,利用SR-RL6构建点云模型, SketchUp加载点云后制作三维模型,最后对三维模型进行修饰和应用。
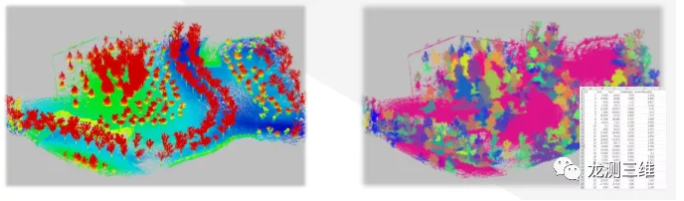
林木信息提取
SR- RL6能够准确获得树木三维点云,利用自动处理软件进行点云单木分割,基于点云分割形成的单木数据提取树木的树冠、胸径、树高等信息。
下图所示为某公园人工林的点云数据,使用SR- RL6背负式扫描林木获取原始数据,本次使用了GNSS模块,因此并不需要作业路径闭环,限制作业范围或时间,使用OmniSLAM° Mapper软件进行数据解算,最后可以获得带有大地坐标的林木点云数据。利用第三方软件的单木分割及统计功能可以提取树木的胸径、树高等信息。
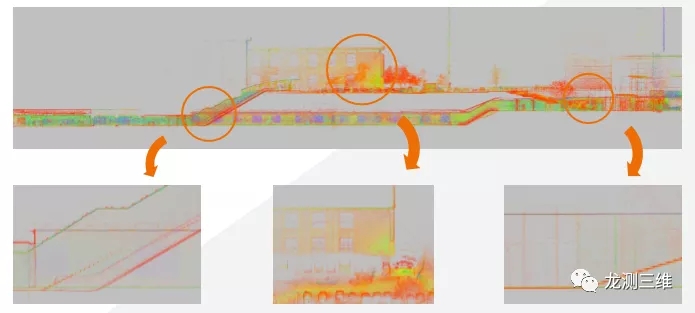
地下、地上和室内空间的联合测绘
SR- RL6可以进行地下空间、地上空间和室内空间的联合测绘,地上空间实时获取RTK控制点,经过RTK-SLAM°算法联合解算,可以为地下或室内空间地物赋予大地坐标。
下图所示为某区域的地面、商场和地下走廊及连接各处电梯的联合测绘,使用CAD软件设置40%透明度,可以清晰看到各种建筑设施结构。
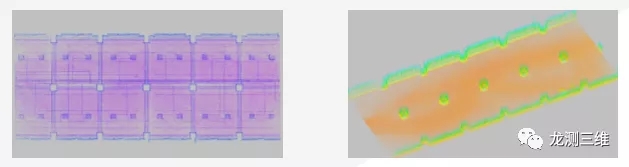
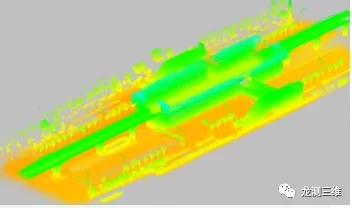
室内结构
SR- RL6获取的室内点云能够精准表现通风管道、窗户、立柱等结构,各结构间三维关系及精度准确。
下图所示为某写字楼单层室内结构,从点云中可以清晰辨认立柱、窗户、通风管道等。
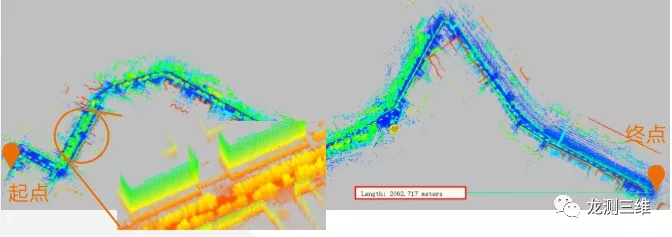
非机动车道
SR-RL6在接入GNSS条件下,并不囿于闭环或者短距离路径,非常适合非机动车道等直线型或者难以形成闭环的测区,非机动车道可以测得行道树、花坛、底铺、建筑立面等结构信息。
下图所示为某公路,距离约为2公里,使用SR- RL6接入GNSS后-次性测得,沿途可以获取到多种类别的具有CGCS2000等大地坐标的地物信息。
高架桥/车站
SR-RL6可以在高架桥下测量,对车载激光雷达扫描系统的测区进行补测,点云具有与车载所测数据一致的坐标,并且能够一次性测得站内等室内空间结构。右图所示为某高架桥、车站及周边环境的点云模型。
住宅区
SR- RL6测量住宅小区,可应用于小区建筑物外立面改造,园区景观改造等。
下图所示为长约448米,宽约213米,面积约95424平方米的住宅小区,共有23栋楼,数据采集时长约为30分钟。
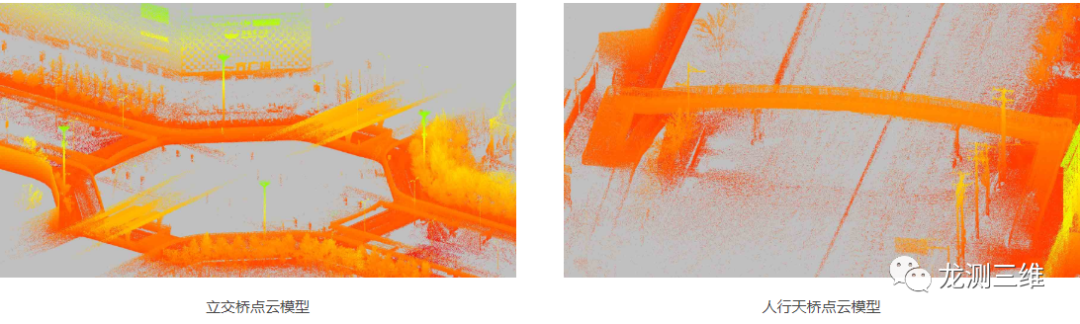
立交桥/天桥
SR- RL6能够测量立交桥、天桥等车载扫描系统较难以测量的区域,并且能够对测区的零散区域进行补测。右图所示为某环形立交桥的第二层公路及其周边环境。
除此之外,SR-RL6还可应用于电力线、电塔、配电室、工厂、罐体、巷道、管廊等地物的测绘以及BIM等行业应用。

 ∷
∷