欧思徕RTK-SLAM激光全景测绘机器人
——R8全新上线
▲
手持式

▲
背负式
选配A:可获得带有位置和姿态信息的全景图片,像素级真彩色点云。
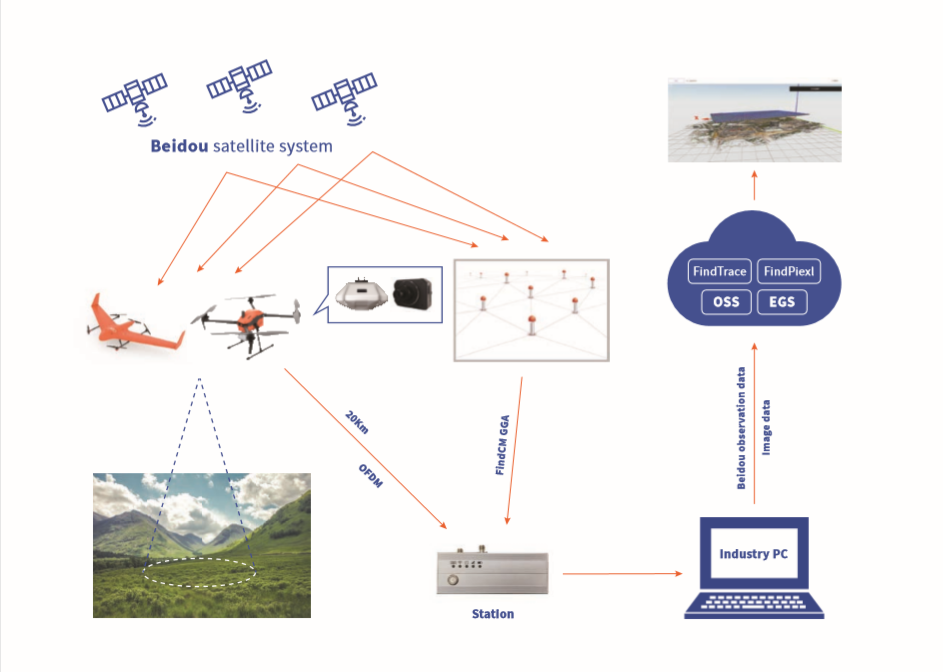
选配B:可自动获得绝对坐标系下的点云,例如CGCS2000,可自动平差。
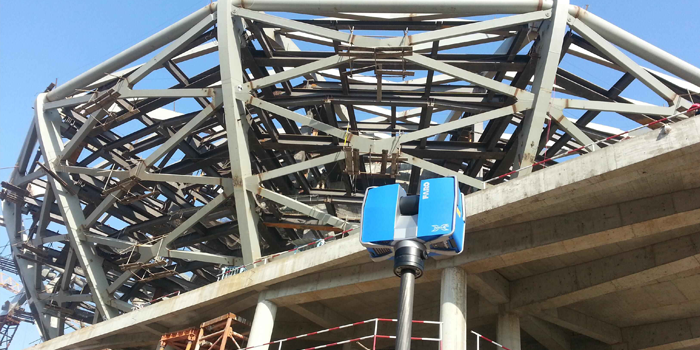
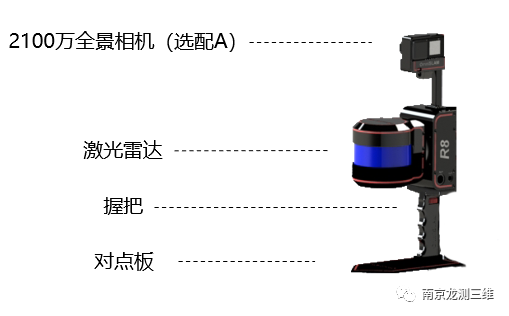
单激光雷达旋转式移动扫描产品R8,是一台性价比极高的便携式空间三维点云数据获取工具。产品可集成16线120米、32线120米或者32线300米的激光雷达,可以360度旋转扫描空间三维结构,采用模块化设计理念,可以额外配置全景相机、GNSS等功能模块。产品以灵活的结构设计和优化的SLAM算法,诠释了单激光雷达在获取空间三维结构数据上的优越性。
产品特点
▷激光雷达360度旋转扫描空间结构
▷手机实时显示当前场景的点云模型
▷1 TB 固态硬盘满足8小时不间断作业
▷支持手持、背负、车载等多种作业模式
▷数据格式为国际通用格式,满足多样需求
▷适配通用型号锂电池满足长时间作业任务
▷巷道、管廊、树林、建筑等多种应用场景
▷手机实时查看设备运行状态,控制作业流程
▷设备结构简单操作简便,易学易用
▷搭配具有自主知识产权的数据处理软件
▷成果为点云、位置、姿态、图像等数据
▷支持千寻位置、CORS站等RTK实现方式
▷背包架作为标配附件,减轻用户自制负担
▷批处理功能实现计算机24小时不间断运行
▷5分钟学会使用软件,数据解算无需人工干预
▷导入七参数即可获得当地坐标系统的点云数据
旋转式激光雷达
欧思徕智能重新定义扫描方式,将电机与激光雷达相结合,电机带动激光雷达顺时针旋转,360度扫描空间结构,无死角,并且自主研发旋转式点云拼接算法。
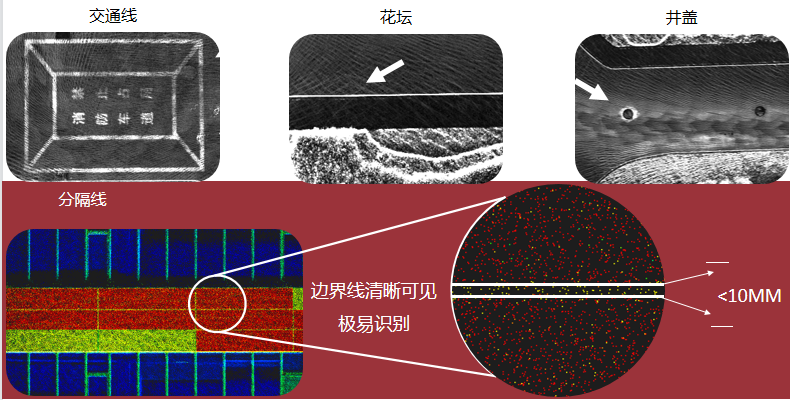
精准强度信息点云
欧思徕智能自主研发的R8机型支持获得强度信息的精确度和清晰度均在10mm以内的点云,用户可以依照点云强度信息绘制成果图。

持续不断电采集时长
R8单次持续不断电采集时长可以达到90分钟。R8单次90分钟的作业时长可以完成近30万平方米面积的测区的采集任务。

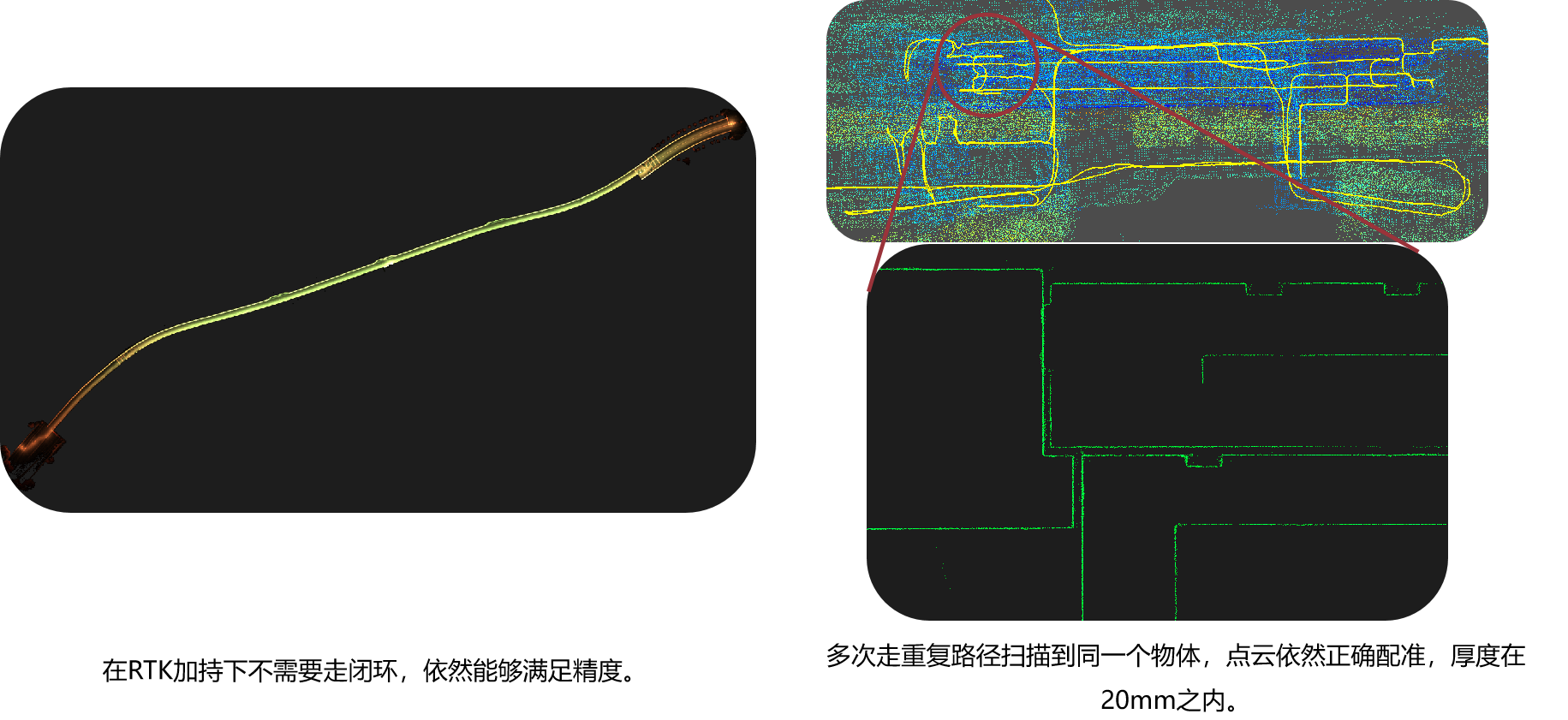
无需闭环随意走重复路径
R8在RTK加持下不需要走闭环,随意规划作业路线。在任何环境下随意走重复路径,多次扫描同一物体,点云不分层。
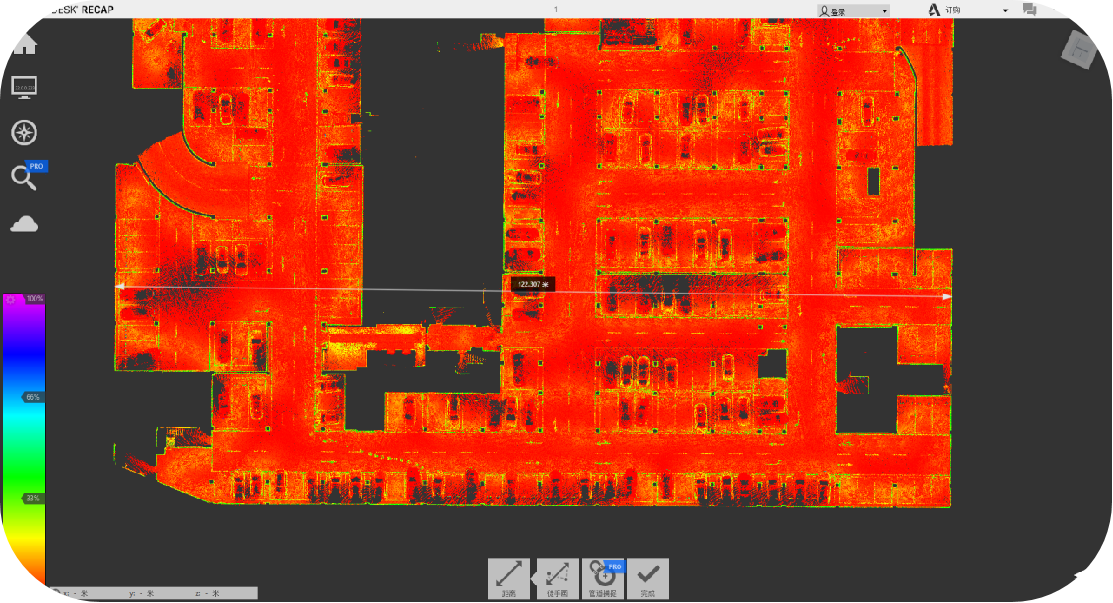
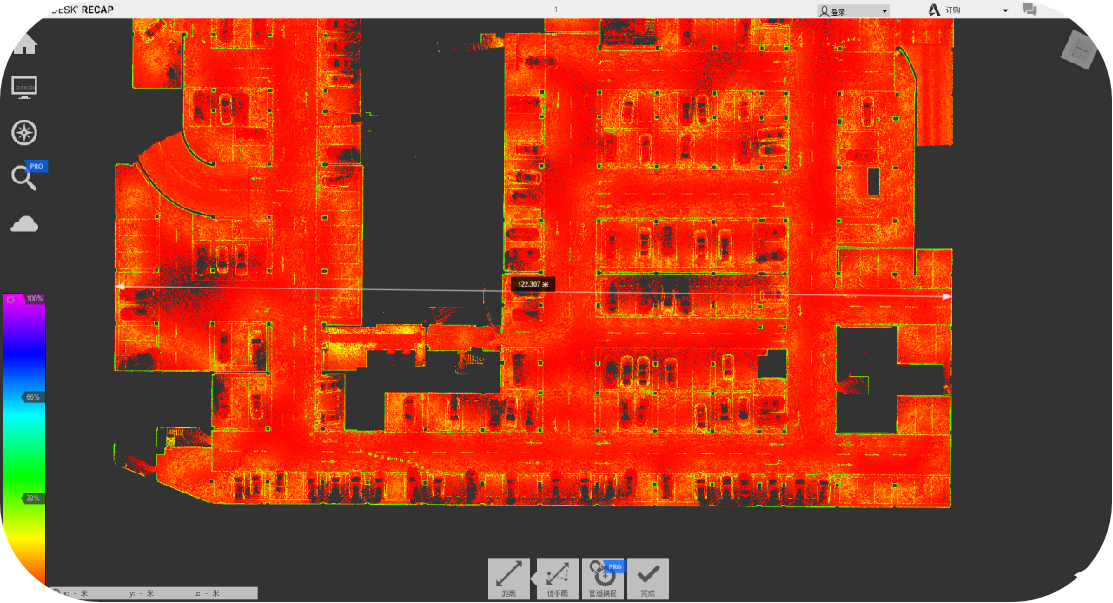
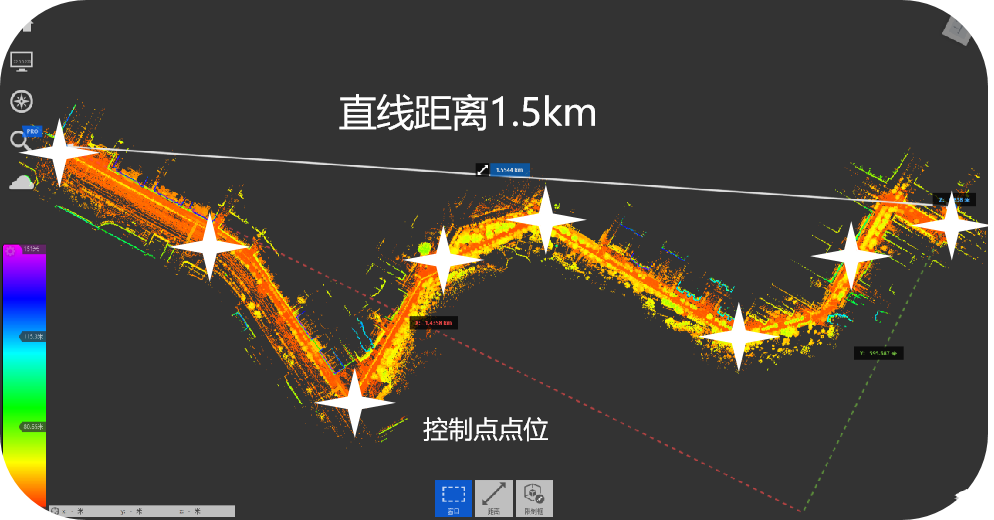
相对精度
长距离条件下的相对精度才有意义,距离要超过激光雷达的有效距离,经过长时间的特征配准,方能测量出物体的相对关系是否准确。R8获得的点云在100m以上间隔的相对精度小于±10mm。
绝对精度
R8测量测区的面积在50000平方米以上,检验点的间距在100m以上,CGCS2000坐标系下点云的精度小于30mm。
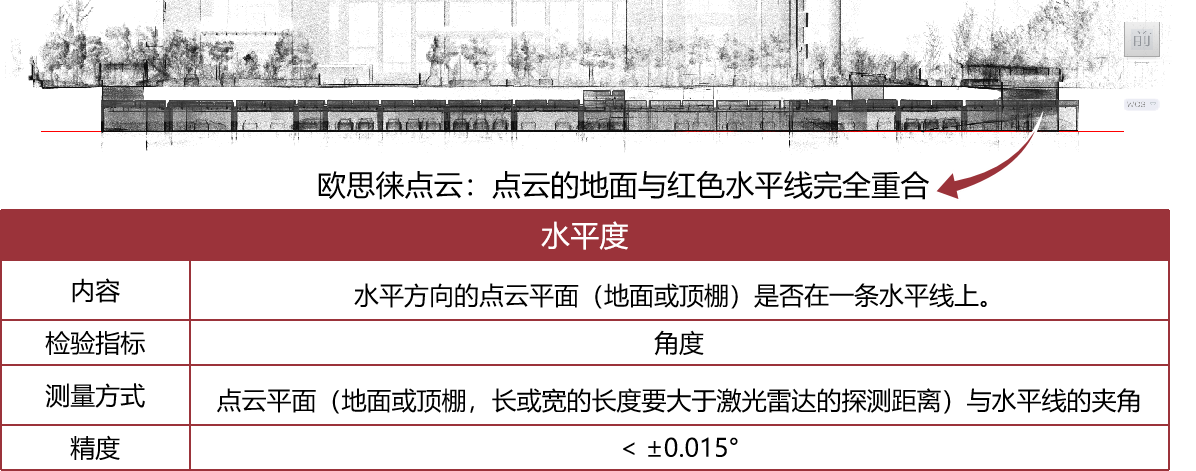
水平度精度
R8获得的点云具有极高的水平度,水平度精度小于0.015度。
垂直度精度
R8获得的点云具有极高的垂直度,垂直度精度小于0.015度。
点云厚度精度
R8获取的未滤波原始点云的厚度小于20mm,无论扫描的是建筑物、公路,还是树林、矿堆、矿道等场景,皆可获得具有一致性的极窄的点云厚度。

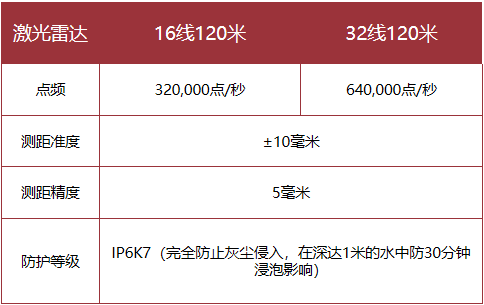
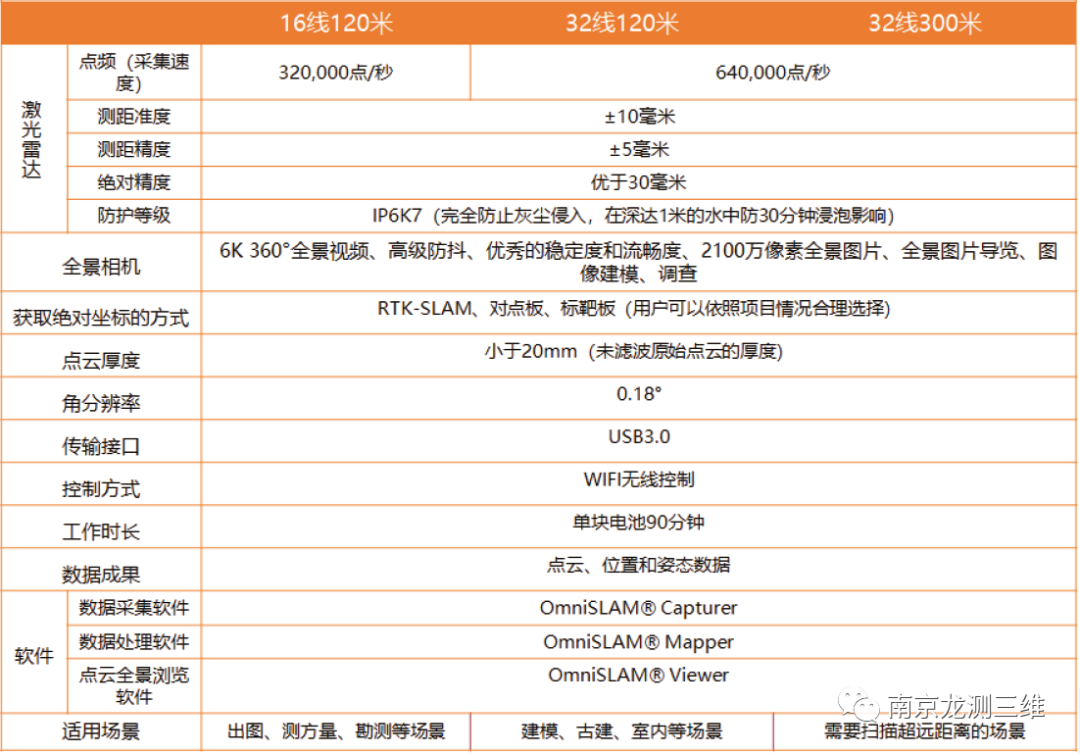
技术参数
 ∷
∷