当今的移动扫描设备扫描速度快、可扫描大型空间,且能够生成精确的高质量点云,适合对点云质量要求非常严苛的项目。
行业内普遍认为移动扫描设备可以加快捕获工作流程并帮助客户发展业务。但我们可能不知道的是,当今最好的移动扫描系统可以满足非常苛刻的建档项目的要求,生成极其精确的点云。
接下来,我们将为大家展示这是如何达到的。以下是一个快速概述,介绍如何使用移动扫描设备实现 6 mm(或更高)的精度。
移动扫描最佳实践
Best Practices
由于这些设备在移动时捕获点云,因此它们容易出现小误差,从而降低点云的质量。幸运的是,当今的移动扫描设备提供的功能可帮助纠正这些错误并确保尽可能高的准确性。
闭环扫描
闭环扫描是大多数移动扫描设备都支持的业界标准,并且对于小型的扫描项目,这通常是我们所需要的全部功能。
▲闭环扫描示意图
若要采取闭环扫描,请返回到已扫描的一个位置。SLAM(同步定位与地图构建)算法将识别此位置并自动优化点云,以更正错误并提高准确性。
锚点优化
市场上只有少数先进的移动扫描设备提供锚点优化功能。此功能是许多扫描项目的可选项。因为对于较小型的扫描项目,我们可以通过闭环扫描实现高精度;而当扫描较大的建筑资产时,它将变得至关重要,因为它纠正了长时间扫描可能会导致的点云的漂移误差。
我们以不同的方式实施此功能。若要将锚点优化功能与 NavVis 的扫描设备配合使用:
需要在整个资产中添加控制锚点,并使用全站仪记录其坐标。扫描时,使用NavVis扫描设备捕获控制点。在数据处理时,输入每个控制点的已测量坐标,软件将使用该信息优化点云并提高其准确性。
场景验证
Proof From the Field
现在,让我们演示一下如何使用闭环扫描和锚点提高对扫描数据准确性的预期。为此,我们将展示 NavVis 使用其可穿戴移动扫描设备NavVis VLX(了解更多:新品介绍|NavVis VLX:可穿戴的室内移动扫描系统)进行的两个场景的测试。
使用闭环的小型扫描
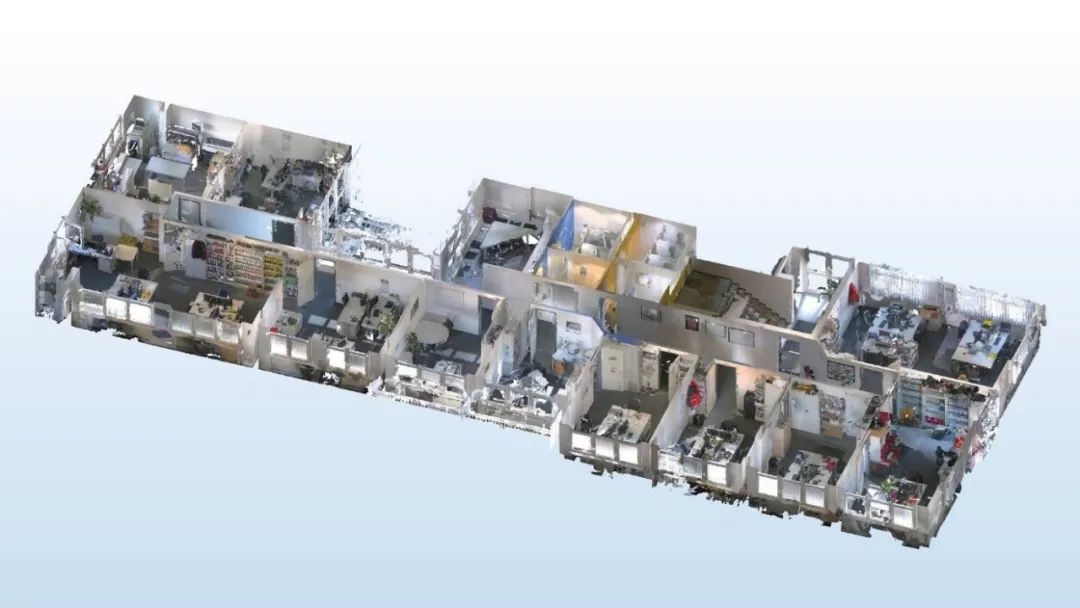
第一个测试,NavVis 团队扫描了普通办公楼的一部分。他们选择这个环境,因为房间和走廊的组合扫描对移动扫描设备是个挑战。换句话说,它可能会产生需要被更正的误差。由于扫描规模较小,因此团队选择了闭环扫描(但没有使用锚点)来优化点云并消除漂移误差。
小型扫描测试条件:
面积:460平方米
扫描时间:30分钟
锚点:0
为了做到实事求是,NavVis使用全站仪为办公室进行了扫描。供应商团队手动测量了全站仪扫描结果中的距离,并与移动点云中的相同距离进行了对比。
结果
事实证明,闭环扫描可以有效地纠正这种小型扫描中的误差。
24次局部测量中有22次在5毫米精度内(与测绘所得数据相比)
其余2次局部测量在6毫米和10毫米的范围内
使用锚点的大型扫描
下一次扫描测试,NavVis 团队选择了扫描停车场。由于建筑面积相当大,他们知道最后的点云很可能出现漂移误差。为了纠正此误差,他们使用了闭环扫描和锚点优化的组合。
▲停车场实景和点云对比
大型扫描测试条件:
面积:1500平方米(大)
扫描时间:20分钟
锚点:8
团队通过两种方式优化了数据:一次仅采取了闭环扫描,另一次同时使用了闭环扫描和锚点。最后,他们将这两个数据集与委托的当地供应商的架站仪扫描结果进行比较。
▲使用NavVis VLX扫描生成停车场点云图像
结果
锚点优化证明在减少漂移误差方面非常有效。
闭环扫描:8mm绝对精度
闭环扫描和锚点优化:6mm绝对精度
总结
Wrapping Up
从以上提供的数据中,能很清楚的看到闭环扫描和锚点优化可以帮助我们生成非常精确的点云。
 ∷
∷