您好,欢迎光临南京龙测测绘技术有限公司!
语言选择:  ∷
∷ 
∷ ∷ 




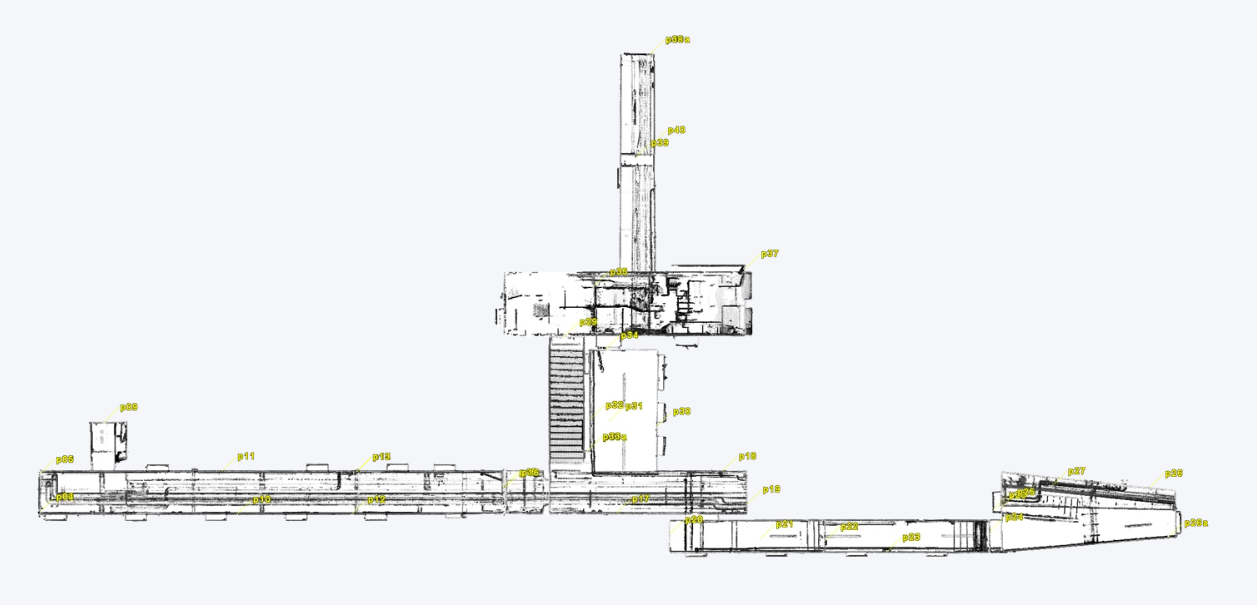
将所有可能配对的43个目标连接起来后,我们可以提取出903条点对点线路。
对于任何给定的点云,半自动提取方法都无法正确提取出大约三到四个目标。因此,每个点云的线条总数略有不同。计算得出的提取目标之间的距离从10厘米到 50 米不等。
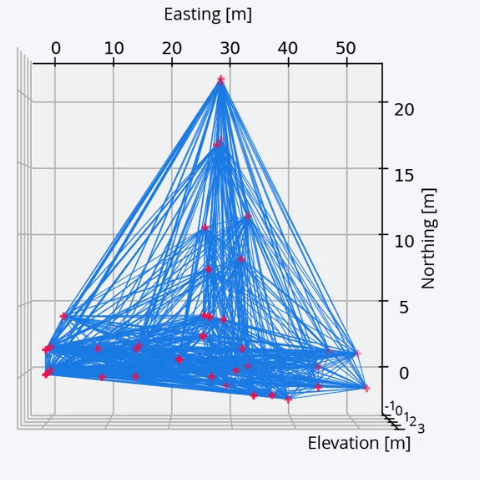
▲俯视图 - 线条
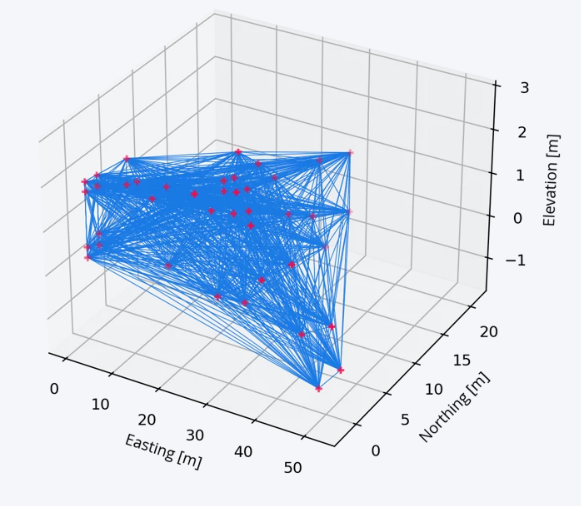
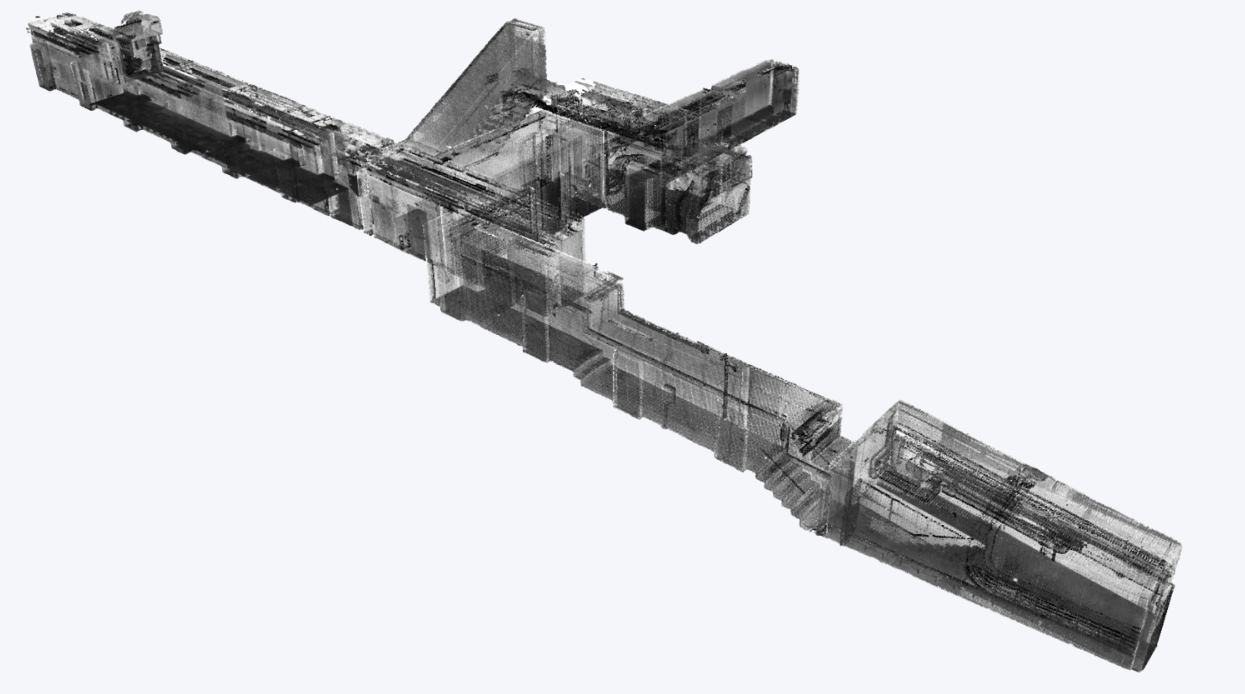
▲三维视图 - 线条
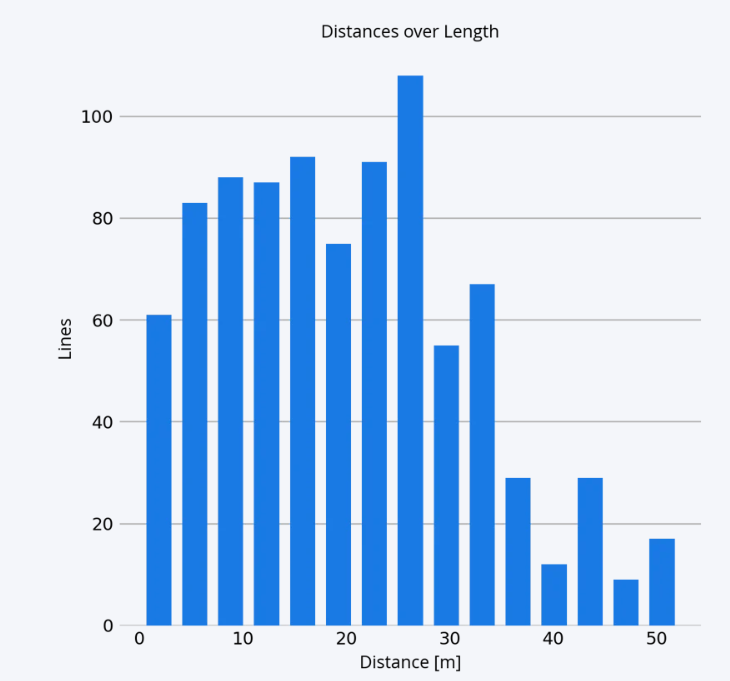
▲每段距离每段距离的线条数量
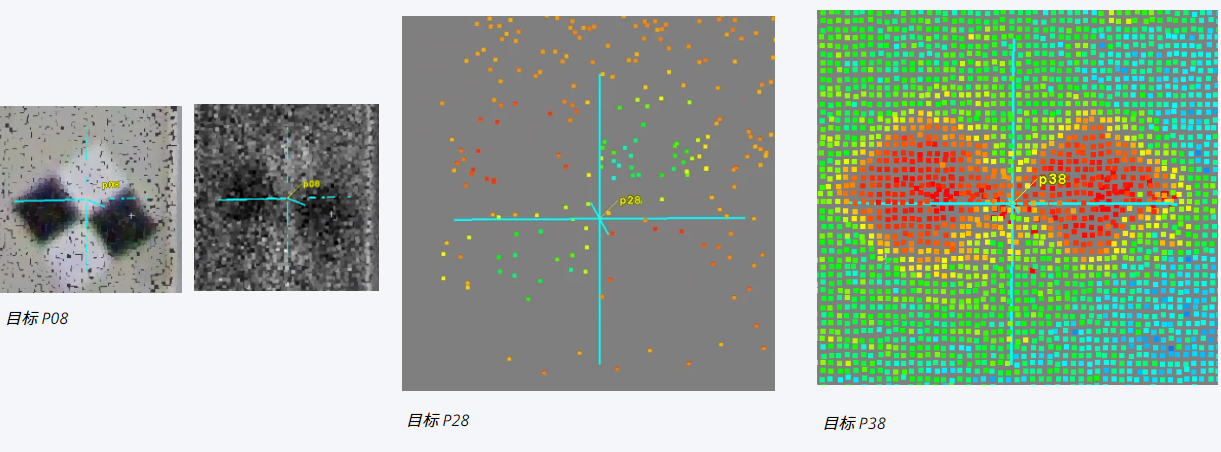
图中有三个峰值,分别对应目标 P08、P28 和 P38。
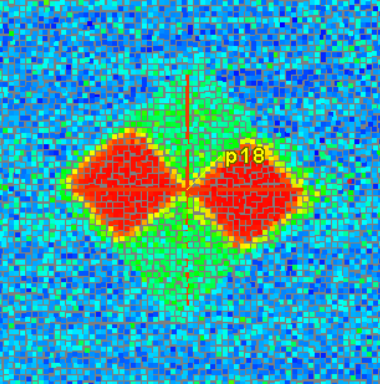
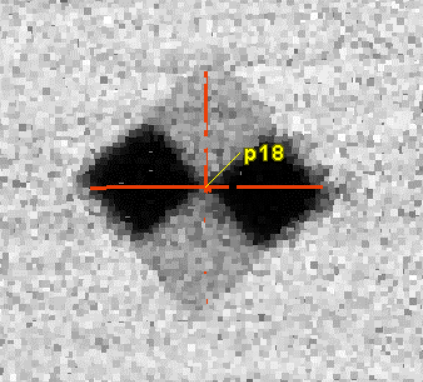
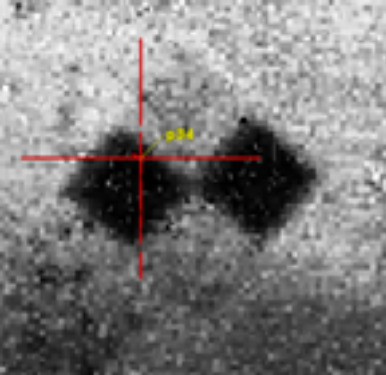
仔细观察 P08 目标,我们发现 rgb 着色点云的中心位置存在明显偏差。由于强度对比度不足,算法无法找到正确的目标中心。请参见下图目标P08 。
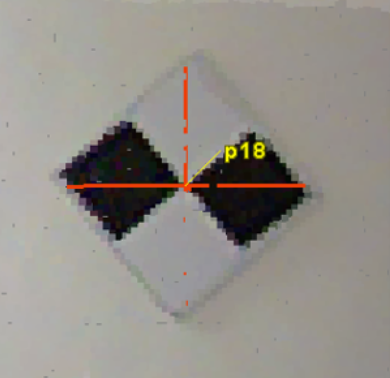
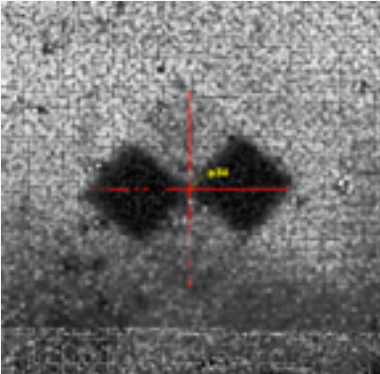
目标 P28 被放置在一个扫描仪只能在短时间内看到目标的位置。因此,该区域的点密度和强度给目标识别带来了挑战。见下图目标 P28。
目标 P38 在点云中的强度分布略不对称。经目测验证,目标中心不正确。见下图目标 P38。
当发现这三个异常值是不正确的测量值时,我们将它们从进一步的计算中删除。虽然一些提取的目标没有显示出理想的强度信息,但从视觉角度来看,它们仍然是正确的,因此我们保留了它们,以作进一步研究。
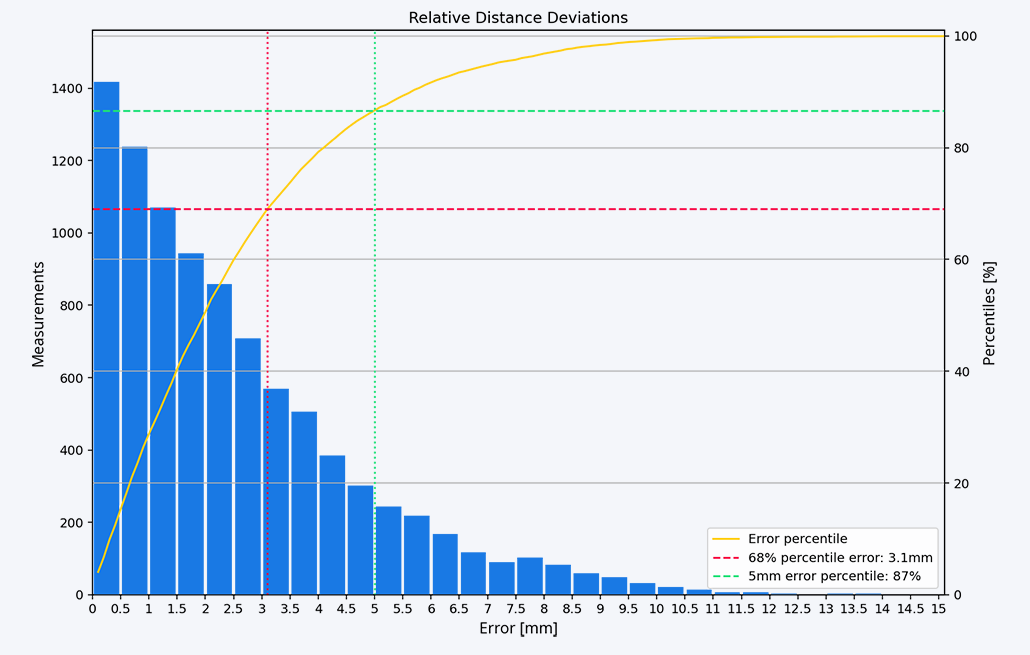
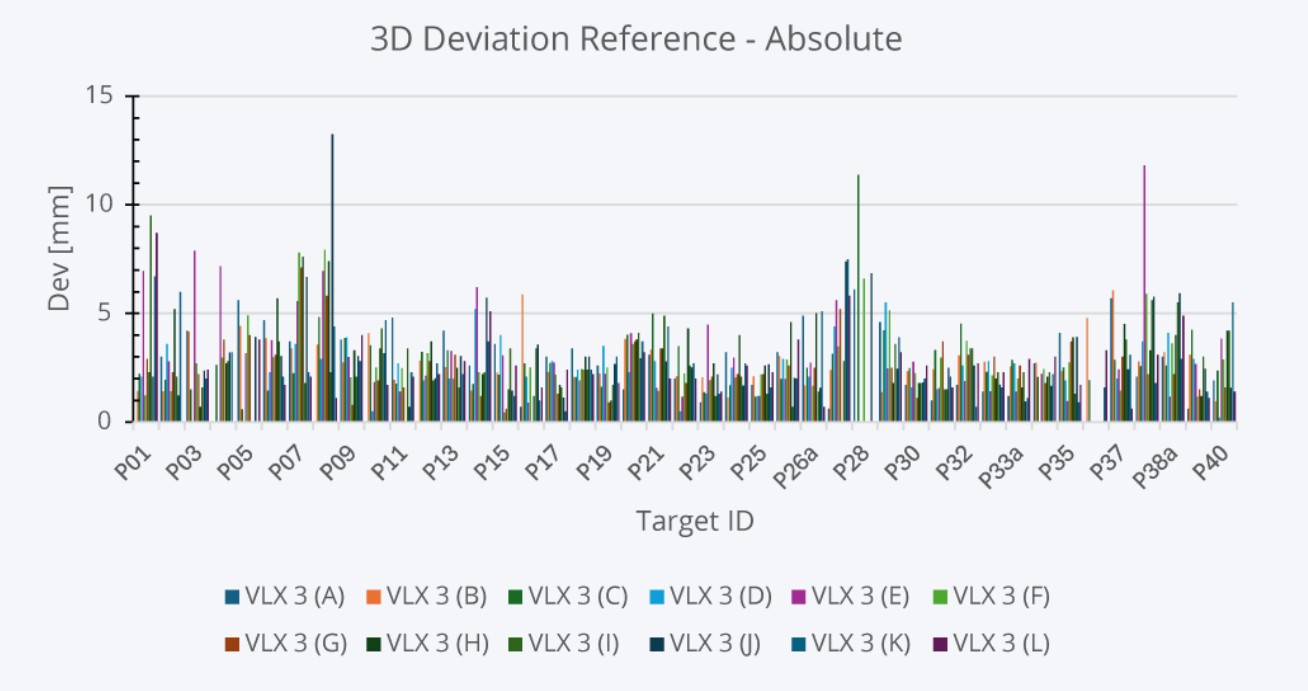
▲相对偏差柱状图
绿线表示NavVis VLX 3 规格表中规定的5毫米精度。从这条线可以看出,从点云中提取的 87% 的距离测量值与基准点的偏差在5毫米以内。

南京龙测测绘技术有限公司 版权所有 地址:江苏省南京市江北新区星火路15号智芯科技楼510室 备案号:苏ICP备20044645号-1 网站地图